
Интеллектуальные роботы
Для выполнения сборочных операций необходимы роботы с обратной связью. Это связано с тем, что для управления сборочным роботом необходимо вдвое увеличить число расчетных координат.
Помимо информации о положении и ориентации рабочего органа требуется информация о распределении сил по трем координатным осям и распределении вращающих моментов вокруг этих осей (и соответственно вычисление координат, векторов сил и моментов).
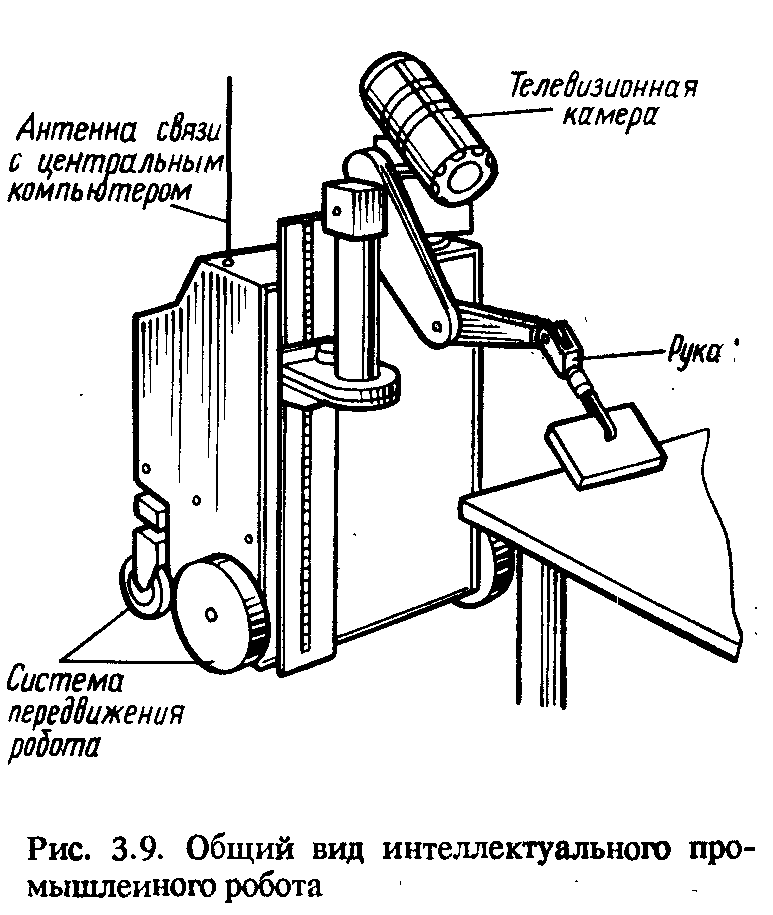
В большинстве практических случаев комбинированный анализ позиционной и силовой информации оказывается чрезвычайно сложной задачей и может выполняться только интеллектуальными роботами (рис. 3.9).
ЭВМ роботов самостоятельно корректирует рабочую программу: проводит сложный логический анализ внешней среды (используя знания, полученные в процессе выполнения всех предыдущих заданий) и по результатам анализа выбирает из памяти управляющей системы одну из множества рабочих программ.
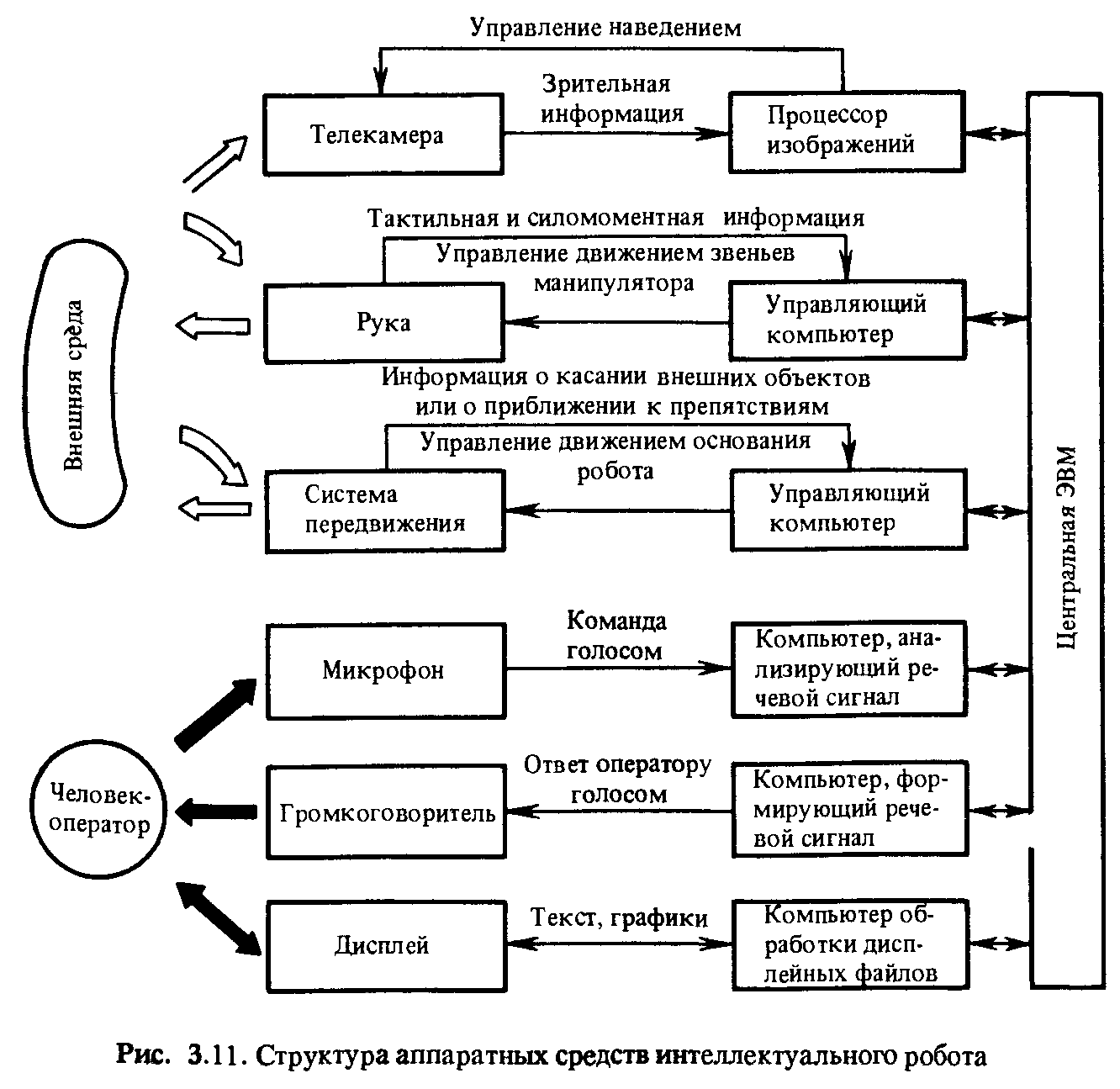
К основным типам современных алгоритмов управления относится управление с видео, осязательной и инерционно-силовой информацией.
Датчики зрения (датчики визуального очувствления) дают оптическую информацию о внешней среде. С помощью искусственного зрения ПР могут:
-
1) распознавать требуемые предметы в неупорядоченном потоке и вычислять их координаты (например, на конвейере). Узнавание происходит посредством сравнения изображения предметов на конвейере с образами предметов, которые хранятся в памяти робота;
-
2) определять положение и ориентацию деталей и узлов в процессе сборки, а также точки их сопряжения;
-
3) проводить контроль качества деталей (например, человеческий глаз не в состоянии определить наличие дефектов в интегральных схемах или оценить правильность и точность геометрических форм круглых и шарообразных деталей);
-
4) обходить препятствия, встречающиеся на траектории дни жения робота.
На рис. 3.10 показано следящее устройство с преобразовате-. лями обратной связи. Оно состоит из фокусирующей линзы 1, осветительной лампы накаливания 2, фотоэлемента 3, вычислительного устройства 4 и масштабной линейки 5. Кодирующее устройство, пересчитывающее длину пройденного пути в количество дискретных шагов, устанавливается на самом роботе.
В качестве сенсоров зрения (приемников и преобразователей первичной видеоинформации) применяются телекамеры с вакуумными приборами — видиконами, а также полупроводниковые камеры и линейки на основе приборов с зарядовой связью (ПЗС-камеры и ПЗС-линейки).
Первичная обработка и распознавание производятся микроЭВМ и мини-ЭВМ.
Для формирования сигнала управления применяются также преобразователи, имеющие фоточувствительные катоды и преобразующие инфракрасное излучение распознаваемых предметов в сигналы управления.
Датчики осязания, называемые также датчиками тактильного очувствления, дают информацию о касании между «схватом» робота и обрабатываемым предметом. Они получают и передают информацию о величине и распределении давления по контактирующей поверхности. С помощью тактильной обратной связи робот может точно определить действительное расположение деталей, их размеры и форму и соответственно скорректировать программу.
Датчики силового тактильного очувствления (силового осязания) дают информацию о величине вертикальной составляющей реакции опоры — при контакте между схватом и предметом.
Датчики силового очувствления определяют величины сил и моментов, возникающих в звеньях манипулятора при контакте рабочего органа с предметом. Информационное устройство состоит из нескольких тензопреоб-разователей (или пьезоэлектрических и пьезорезистивных преобразователей). В простейшем случае силовым датчиком может служить обыкновенная пружина. Величина растяжения и сжатия пружины под действием измеряемых сил регистрируется измерительными приборами и передается в управляющую ЭВМ, где преобразуется в сигналы обратной связи для приводов каждого звена манипулятора.

Силовое очувствление позволяет: оценивать вес предмета в захватном устройстве; определять наличие или отсутствие касания между перемещаемым предметом и другими в рабочем пространстве; вставлять стержень в отверстие; обходить препятствие; укладывать однотипные предметы в тару; перемещать длинные несбалансированные предметы с помощью двух захватов одновременно.
Способ управления сборочным роботом, при котором корректирующие воздействия вырабатываются на основе анализа сил и моментов реакции, называется активной податливостью.
Сборочные системы с активной податливостью с помощью пружинного устройства способны измерять силы, развиваемые схватом, автоматически выполнять сближение собираемых деталей,
Применение современных средств автоматизации позволяет:
повысить коэффициент производительности оборудования; сократить время холостых ходов, увеличить выход годных изделий, снимаемых с оборудования, уменьшить продолжительность рабочего цикла;
повысить качественные показатели продукции, снизить разброс в параметрах и характеристиках изготовляемых изделий;
создать оборудование, выполняющее производственные функции без непосредственного участия человека, либо с его ограниченным участием на уровне квалифицированного труда — это обеспечивает сокращение численности рабочих, решение вопросов охраны труда, санитарной, вакуумной гигиены и экологических проблем.