
Конструкция роботов
Любой промышленный робот представляет собой автоматическую машину, состоящую из управляющей и исполнительной систем (рис. 3.1).
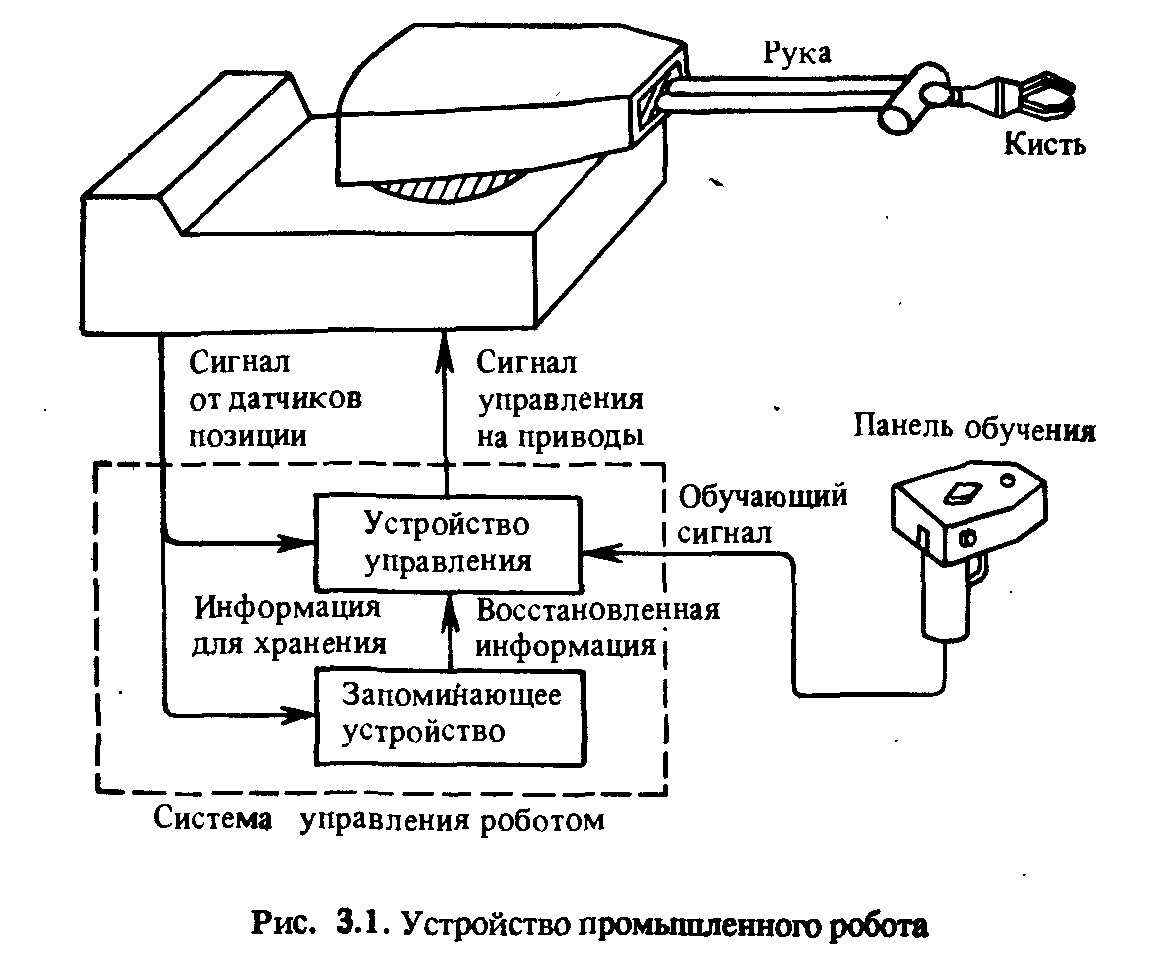
Управляющая система принимает от человека задание на работу и обеспечивает выдачу команд на исполнительные механизмы в зависимости от заданной программы, а также осуществляет контроль за выполнением задания. Она обычно состоит из блоков памяти, логики и пульта управления (см. с. 32).
Исполнительная система включает в себя: механический манипулятор, способный непосредственно выполнять заданную работу; систему передвижения, доставляющую манипулятор к рабочему месту.
Манипулятор — многофункциональное механическое устройство (близкое по своей конструкции, функциям и двигательным возможностям к руке человека), предназначенное для выполнения операций захвата и перемещения предметов в трехмерном пространстве или (и) их технологической обработки. Иногда манипулятор называют рычажно-захватным устройством. Обычно манипулятор представляет собой разомкнутый многозвеньевой механизм, состоящий из (рис. 3.2):

рычажного устройства с приводом (наподобие плеча и предплечья у человека), способного совершать возвратно-поступательные перемещения (линейное горизонтальное или вертикальное и вращательные движения);
захватного устройства (наподобие человеческой кисти с пальцами), которое с помощью приводов может совершать различные поступательные и вращательные движения. На практике применяются вакуумные, механические, магнитные захватные устройства.
Манипулятор располагается обычно сверху станины, покоящейся на основании (рис. 3.2). Движение манипулятора состоит из перемещений рычажного устройства, которое определяет положение захватного устройства в рабочем пространстве, и из перемещения самого захватного устройства, которое определяет ориентацию захватного устройства.
Человеческая рука имеет шесть степеней свободы (рис. 3.3). Для работы с 3-мерными деталями манипулятор робота в оптимальном случае должен иметь также шесть степеней свободы: три — для переноса детали в заданное положение и еще три — для установки детали в нужной ориентации. Дополнительно одна степень свободы должна приходиться на открытие-закрытие захватывающего устройства или включение-выключение вакуумного присоса.
Степенями свободы робота являются, например, прямолинейные перемещения, поворот или вращение каждого из звеньев манипулятора (как рычажного, так и захватного устройства).
Увеличение степеней свободы усложняет конструкцию, увеличивает размеры и стоимость робота, но позволяет выполнять большее количество разнообразных операций и облегчает адаптацию робота к изменениям внешней среды. В зависимости от практического назначения и применения промышленные роботы имеют рычажные устройства с тремя—пятью степенями свободы, захватные устройства с двумя степенями свободы и станину с одной-двумя степенями свободы (рычажное устройство поворачивается в горизонтальной плоскости, перемещается и наклоняется в вертикальной плоскости, выдвигается и убирается обратно, перемещаясь вдоль своей оси; захватное устройство дополнительна наклоняется в вертикальной плоскости и вращается вокруг горизонтальной оси).
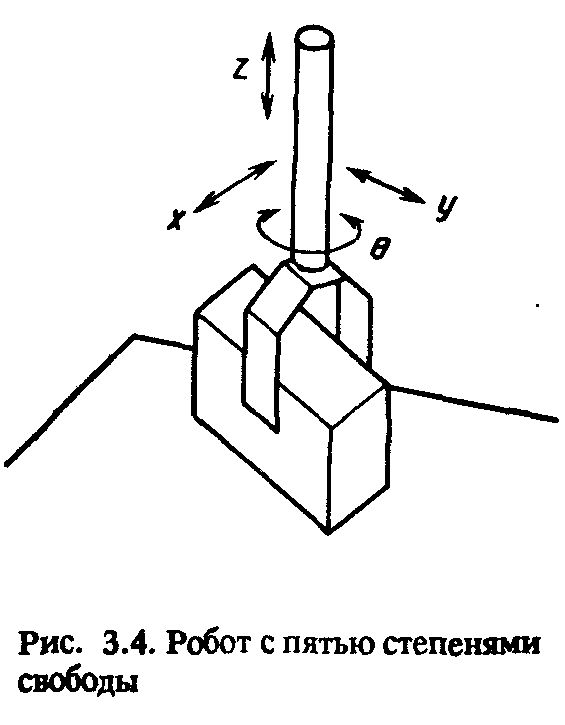
Робот, показанный на рис. 3.4, имеет пять степеней свободы, необходимых для захвата предмета с горизонтальной подставки: из них три степени свободы необходимы для перемещения захватного устройства к предмету вдоль координатных осей х, у, z одна степень свободы для придания «схвату» требуемой ориентации относительно координаты в (поворот вокруг оси z) и одна степень свободы для открытия-закрытия «схвата».
Следует учитывать, что одинаковое число степеней свободы может обеспечивать различное сочетание поступательных и вращательных движений рычажно-захватного устройства (РЗУ). Например, при трех степенях свободы возможны четыре сочетания различных движений рычажно-захватного устройства (рис. 3.5):
а) сочетание трех поступательных движений, при которых конец рычага может перемещаться по взаимно параллельным плоскостям, образующим параллелепипед. Это роботы, у которых начальное и конечное положения движущегося рабочего органа задаются в прямоугольной системе координат (по осям х, у, z) — рис. 3.5, (а);
б) сочетание двух поступательных и одного вращательного движения, при котором кроме движения конца рычага по плоскости возможно движение по цилиндрической поверхности (вокруг вертикальной оси). Это роботы с цилиндрической системой координат (г, в , z);

в) сочетание одного поступательного движения в радиальном направлении и двух вращательных движений, при котором возможны движения по окружностям, расположенным на разных диаметральных сечениях шара с центром, находящимся на оси шарнирного сочленения стойки и каретки. Это роботы с полярной системой координат (г, 0, р) — рис. 3.5, в;
г) сочетание трех вращательных движений, при котором движения могут происходить по многим шаровым поверхностям, образованным из различных центров. Это роботы со сферической системой координат (рис. 3.5, г).
Число степеней свободы и тип системы координат, по которым перемещается рычаг робота, оказывают существенное влияние на геометрию и величину зоны обслуживания (рабочего пространства).
При движении рычага в системе цилиндрических координат зона обслуживаемого пространства возрастает в 9,6 раза, при движении в полярных — в 29,7 раза, при движении в сферических
В 87,2 раза по сравнению с перемещением рычага в прямоугольных координатах (при одной степени свободы).